自転車に配慮する自動運転車設計のためのサイクリストモデル構築 補助事業
2023年4月〜2025年3月


成果報告
本研究では、自転車利用者(サイクリスト)の安全性と快適性に配慮した自動運転車(AD車)の設計に向けて、サイクリストの行動モデルとそれを検証・応用可能な自転車シミュレータ(Cycle Simulator, CS)を構築しました。以下に、本事業の主な成果を紹介します。
◆ 自転車シミュレータ(CS)の構築と改良
- サイクルトレーナーをベースに、リーン(傾き)操作やハンドル操作が可能な搭乗型シミュレータを開発。
- モニター7面による広視野な仮想環境を表示するために、GPU搭載のPC群を導入・再構成。
- 実際の自転車競技経験者からも好意的なフィードバックを得て、操作性やリアリティの高さが確認されました。
- 視覚・操作の自然さや空間感覚の再現性が評価され、実車に近い仮想運転環境が実現されています。
- ケイデンスだけではなく、ペダル踏力も観測することで、サイクリストの意図の観測を容易にしています。
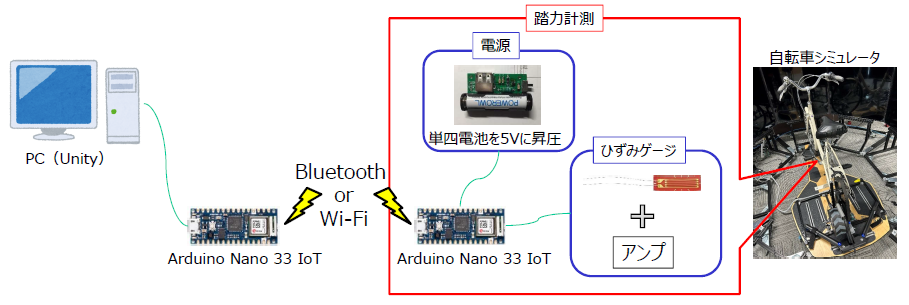
行動観測に向けたサイクリストシミュレータの構成:ペダル踏力計測系
◆ サイクリストの行動観測と意図モデルの構築
- 自転車の操作意図(ペダリング・巡航・ブレーキ)を識別するため、ペダル踏力を測定可能な観測系を開発。
- 歪ゲージ、Wi-Fi対応マイコンを用いたテレメトリ装置をペダル上に搭載し、非接触でデータ収集が可能に。
- これにより、サイクリストの意図状態をより正確に識別できるようになり、判断モデルの精度向上に寄与しました。
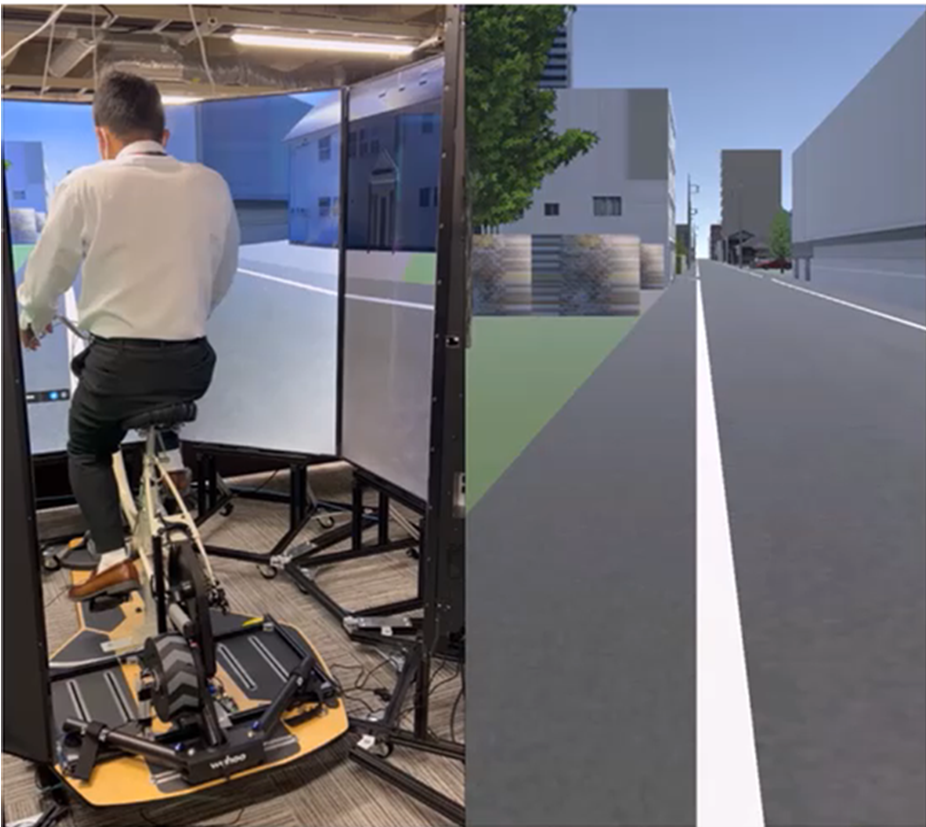
行動観測実験中の様子(左・サイクリストシミュレータに搭乗する様子,右・仮想環境中の本人視点画像)
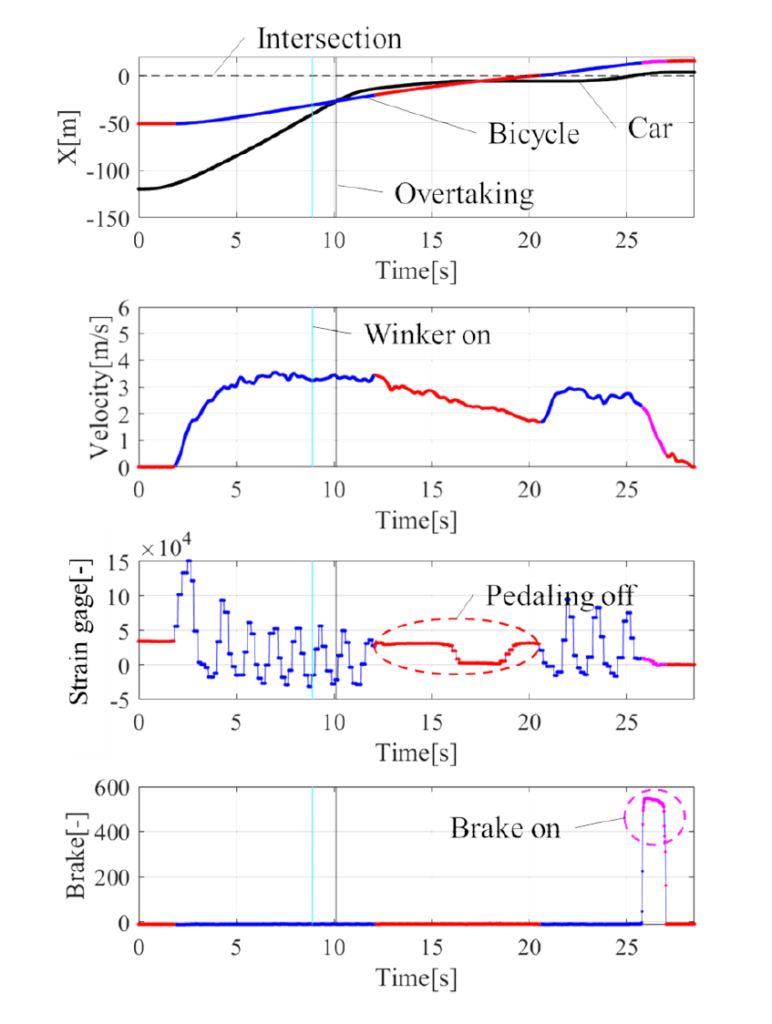
観測されたデータの例
◆ 判断モデルの開発と比較検証
- サイクリストの交差点進入判断などをモデル化するために、ロジスティック回帰モデル(LRM)とGaussian Mixture Model(GMM)を構築。
- LRMモデルは、特にブレーキの使用判断の再現において、シンプルながら十分な精度を達成。
- GMMは巡航時の予測において高めの精度であり、ブレーキ操作の少ない被験者に対して有効であった。
- 判断をもとに、一定速度を保つ巡航、ブレーキ、力行を切り替えるシミュレーションモデルが構築できた。
- モデル性能の改善に向け、ニューラルネットワーク(NN)やオートエンコーダを用いた次元圧縮手法も試行し,その性能を比較した。
◆ 走行速度モデルの構築
- 判断モデルと連動して、走行意図ごとの平均速度(ペダリング時など)を統計的に推定。
- 個別被験者の速度データを基にしたモデルをシミュレータに組み込むことで、より自然な挙動の再現が可能に。
- 判断モデルと、走行モデルを組み合わせることで、行動予測が可能であり、サイクリストの行動の予測にもとづく自動車の運転支援や自動運転車両のアルゴリズム検証が実現可能となる。
◆ 今後の展望
- 構築した判断・動作モデルを用いて、シミュレータ上での動作生成およびその妥当性検証を,引き続き実施する。
- サイクリストの安全と快適性を定量的に評価できる指標(感性指標等)を用いたAD車の設計支援にむけて、本研究で開発したサイクリストシミュレータ行動観測系や、判断・動作モデルを活用していく。
- さらに、開発したシミュレータは自転車のみならず、歩行者、自転車、自動車、あるいは新型のパーソナルモビリティ等、多様な交通参加者が参加する混合交通において、AD車の設計・制御、交通インフラの設計・制御など様々なアプリケーションで、人間中心,特にVRU配慮型の設計への応用が期待される。
本事業により、自転車と自動運転車の共存をより安全かつ快適にするための技術的基盤が大きく前進しました。
本事業に対し、補助、応援くださいました公益財団法人JKA様には厚くお礼申し上げます。