MSCS2024に参加しました
モビリティシステム研究GのKuan君,内田君が,
計測自動制御学会制御部門マルチシンポジウム2024にて発表しました.
https://mscs2024.sice-ctrl.jp/
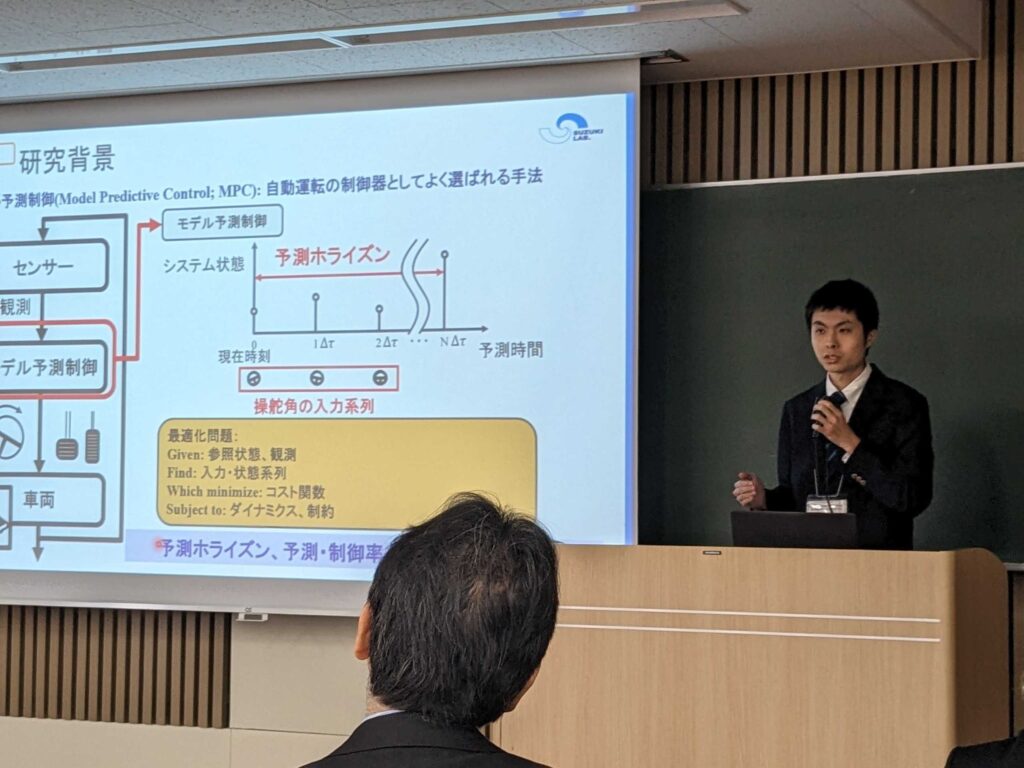

- Kuan Ching Lin, 本田康平, 奥田裕之, 鈴木達也, “マルチホライズン・マルチレートのモデル予測を用いた縦横統合車両制御の性能検証”, 計測自動制御学会 第11回 制御部門マルチシンポジウム(MSCS2024), 2M6-4, 広島大学・東広島キャンパス, 東広島, Mar. 17-20(19), 2024
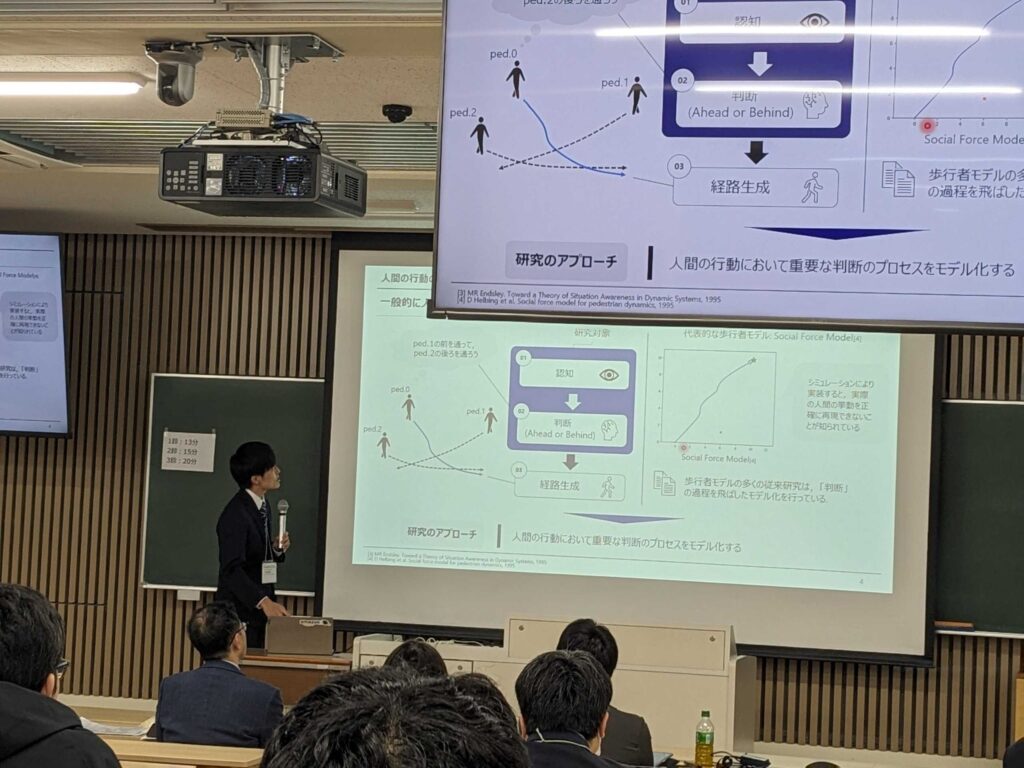
- 内田和磨, 奥田裕之, 鈴木達也, “オープンスペースにおける歩行者間のすれ違い挙動の観測とモデル化”, 計測自動制御学会 第11回 制御部門マルチシンポジウム(MSCS2024), 1M3-4, 広島大学・東広島キャンパス, 東広島, Mar. 17-20(18), 2024